Die BDF-Verfahren (englisch Backward Differentiation Formulas) sind lineare Mehrschrittverfahren zur numerischen Lösung von Anfangswertproblemen gewöhnlicher Differentialgleichungen:
 .
.
Dabei wird für  eine Näherungslösung an den Zwischenstellen
eine Näherungslösung an den Zwischenstellen  berechnet:
berechnet:
 .
.
Die Verfahren wurden 1952 von Charles Francis Curtiss und Joseph Oakland Hirschfelder eingeführt und sind seit dem Erscheinen der Arbeiten von C. William Gear 1971 als Löser für steife Anfangswertprobleme weit verbreitet.
Beschreibung
Im Gegensatz zu Adams-Moulton-Verfahren wird bei BDF-Verfahren nicht die rechte Seite durch ein Interpolationspolynom approximiert, stattdessen konstruiert man ein Polynom  mit (maximalem) Grad
mit (maximalem) Grad  , welches die letzten Approximationen
, welches die letzten Approximationen  an die Lösung sowie den unbekannten Wert
an die Lösung sowie den unbekannten Wert  interpoliert:
interpoliert:
 .
.
Zusätzlich fordert man, dass das Interpolationspolynom die gegebene Differentialgleichung im Punkt  löst, also dass gilt
löst, also dass gilt
 ,
,
und erhält so ein nichtlineares Gleichungssystem für die Bestimmung des implizit gegebenen Wertes .
Lagrange-Darstellung
Eine Möglichkeit für die Darstellung des Interpolationspolynoms ist die Lagrange-Darstellung. Dabei sind die Lagrange-Basispolynome mit den  Stützstellen
Stützstellen  definiert durch
definiert durch

wobei  das Kronecker-Delta ist. Damit folgt wegen
das Kronecker-Delta ist. Damit folgt wegen  direkt die Darstellung
direkt die Darstellung
 .
.
Mit der Forderung erhält man nun die lineare Rekursionsformel für die BDF-Verfahren:
 ,
,
wobei die Koeffizienten  gegeben sind durch
gegeben sind durch
 .
.
Alternative Lagrange-Darstellung
Alternativ betrachten wir die Lagrange-Basispolynome definiert durch

Damit folgt die Darstellung
 .
.
Dabei ist  der Abstand der Stützstellen und die konstante Schrittweite des Verfahrens. Mit der Forderung , wobei hier
der Abstand der Stützstellen und die konstante Schrittweite des Verfahrens. Mit der Forderung , wobei hier

gilt, erhält man nun für die Berechnung der Koeffizienten

und damit die Rekursionsformel

Newton-Darstellung
Die Newton-Darstellung des Interpolationspolynoms verwendet Rückwärtsdifferenzen, welche rekursiv definiert sind durch

Damit lässt sich schreiben als
 .
.
Diese Formel führt wegen  für
für  auf die Darstellung
auf die Darstellung

der BDF-Verfahren.
Alle oben betrachteten Darstellungen der Berechnungsformeln sind äquivalent, da sie nur verschiedene Arten der Darstellung des eindeutigen Interpolationspolynoms verwendet haben. Für  lauten die impliziten Berechnungsformeln der BDF(k)-Verfahren:
lauten die impliziten Berechnungsformeln der BDF(k)-Verfahren:
- BDF(1) – implizites Euler-Verfahren:






Eigenschaften
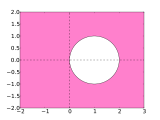
Die BDF-Verfahren sind alle implizit, da der unbekannte Wert in die Gleichung eingeht. BDF(k) besitzt genau die Konsistenzordnung k. Das Verfahren BDF(1) ist das implizite Euler-Verfahren. Dieses und BDF(2) sind A-stabil, die Verfahren höherer Ordnung A( )-stabil, wobei der Öffnungswinkel sich mit höherer Ordnung verkleinert. Insbesondere BDF(2) ist aufgrund seiner optimalen Eigenschaften bezüglich der zweiten Dahlquist-Barriere bei der Berechnung steifer Differentialgleichungen sehr beliebt. Für k<6 sind die Verfahren stabil und konsistent und damit auch konvergent. Der größte Anreiz der BDF-Verfahren sind ihre großen Stabilitätsgebiete, weshalb sie sich für den Einsatz bei der Lösung von steifen Anfangswertproblemen eignen. Für k>6 sind die Verfahren instabil.
)-stabil, wobei der Öffnungswinkel sich mit höherer Ordnung verkleinert. Insbesondere BDF(2) ist aufgrund seiner optimalen Eigenschaften bezüglich der zweiten Dahlquist-Barriere bei der Berechnung steifer Differentialgleichungen sehr beliebt. Für k<6 sind die Verfahren stabil und konsistent und damit auch konvergent. Der größte Anreiz der BDF-Verfahren sind ihre großen Stabilitätsgebiete, weshalb sie sich für den Einsatz bei der Lösung von steifen Anfangswertproblemen eignen. Für k>6 sind die Verfahren instabil.
- Stabilitätsgebiete der BDF-Verfahren
-
BDF1
-
BDF2
-
BDF3
-
BDF4
-
BDF5
-
BDF6
Literatur
- E. Hairer, Syvert P. Nørsett, Gerhard Wanner: Solving Ordinary Differential Equations I, Nonstiff Problems, Springer Verlag, ISBN 3-540-56670-8
- E. Hairer, G. Wanner: Solving Ordinary Differential Equations II, Stiff problems, Springer Verlag, ISBN 3-540-60452-9
- H.R. Schwarz, N. Köckler: Numerische Mathematik, Teubner (2004)
- Curtiss, Hirschfelder Integration of stiff equations, Proc. Nat. Acad. Sci. U.S.A., Band 38, 1952, 235–243.
Weblinks
- Gear, Backward Differentiation Formulas, Scholarpedia
 BDF1
BDF1 BDF2
BDF2 BDF3
BDF3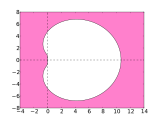 BDF4
BDF4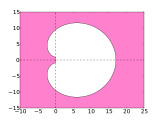 BDF5
BDF5 BDF6
BDF6












