Współrzędne uogólnione
Współrzędne uogólnione – niezależne od siebie wielkości, które jednoznacznie opisują położenie ciała lub układu ciał w przestrzeni[1]. Wielkościami takimi mogą być współrzędne kartezjańskie – wtedy położenie każdego i-tego ciała układu jednoznacznie opisują trzy współrzędne Można także stosować współrzędne walcowe sferyczne (np. kąty określające odchylenia wahadła od pionu), jak również współrzędne równe odległości mierzonej wzdłuż zadanych krzywych od ustalonych punktów do miejsca, gdzie znajduje się dane ciało (por. przykład koralik na drucie) itp.




Liczba współrzędnych, potrzebnych do opisu położenia n ciał swobodnych, tj. ciał, których ruch nie jest ograniczony więzami, wynosi 3n. Jeżeli jednak ciała układu poddane są działaniu więzów, ograniczających ich ruch, to ilość współrzędnych niezbędnych do określenia położenia układu jest mniejsza; np. jeżeli i-te ciało układu jest przyczepione do nierozciągliwej nici, umocowanej w nieruchomym punkcie, to wystarczą 2 współrzędne zamiast 3; jeśli ciało może poruszać się tylko wzdłuż zadanej krzywej, to wystarczy 1 współrzędna.
Współrzędne uogólnione stosuje się zarówno w mechanice klasycznej, jak i kwantowej.
Definicja współrzędnych uogólnionych
Niech dany będzie układ cząstek w przestrzeni. Położenie cząstek w chwili można opisać za pomocą zespołu współrzędnych kartezjańskich Jeżeli jednak ruch cząstek zostanie ograniczony za pomocą więzów, to liczba współrzędnych niezbędnych do opisania położenia układu zmniejszy się o





Mianowicie, niech więzy będę opisane za pomocą równań:

Wtedy zamiast współrzędnych można wprowadzić nowych współrzędnych zadanych za pomocą niezależnych funkcji współrzędnych oraz czasu






Współrzędne nazywa się współrzędnymi uogólnionymi. Określają one jednoznacznie położenie układu w chwili podlegającego działaniu więzów. Zespół współrzędnych uogólnionych oznacza się pojedynczym symbolem tj.


Wielkość oznacza położenie układu w przestrzeni konfiguracyjnej, w której wprowadzono współrzędne uogólnione.

Definicja prędkości uogólnionych
Współrzędne uogólnione – podobnie jak współrzędne kartezjańskie – w ogólności będą zmieniać się w czasie ruchu ciała. Ich pochodne po czasie nazywa się prędkościami uogólnionymi, tzn. wielkości

nazywa się prędkościami uogólnionymi.
Np. jeżeli wyrazi się współrzędne kartezjańskie za pomocą współrzędnych uogólnionych,

to obliczając pochodną zupełną powyższego wyrażenia względem czasu otrzyma się prędkości które zależą od prędkości uogólnionych



Przykłady


Koralik na drucie
Koralik ślizga się bez tarcia po drucie, tworzącym krzywą płaską, podlegając działaniu siły grawitacji. Problem polega na wyznaczeniu położenia koralika w chwili

Opis ruchu we współrzędnych kartezjańskich
Położenie koralika w chwili można opisać wyrażając wektor wodzący za pomocą współrzędnych kartezjańskich
![{\displaystyle \mathbf {r} (t)=[x(t),y(t),z=0].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f41cb78ef741588f1239a3ae80973b08099836e0)
Jeżeli krzywa, po której porusza się koralik, nie jest linią prostą, to zagadnienie rozwiązania ruchu koralika w ramach mechaniki Newtona wymagałoby uwzględnienia sił, zmieniających się w czasie – problem byłby w ogólnym wypadku bardzo złożony.
Opis ruchu we współrzędnych uogólnionych
Opis ruchu można uprościć w ramach mechaniki Lagrange’a, której formalizm pozwala łatwo znaleźć równania ruchu, gdy dobierze się zamiast współrzędnych kartezjańskich współrzędne uogólnione „zgodne z więzami”. W przypadku ruchu koralika wystarczy wyrazić jego położenie w zależności od jednej współrzędnej uogólnionej; jako taką współrzędną dogodnie jest wybrać np. odległości koralika od ustalonego punktu drutu, mierzoną wzdłuż drutu. Odległość jest współrzędną uogólnioną zgodną z więzami.

Ograniczenia nałożone na ruch koralika mogą być opisane za pomocą dwóch równań więzów


Mamy tu współrzędnych kartezjańskich, więzy oraz stopni swobody.



Jeżeli krzywa leży w płaszczyźnie to współrzędna jest funkcją jedynie współrzędnych kartezjańskich



Aby znaleźć tę funkcją wyraża się element łuku krzywej przez przyrosty



Z równania więzów wynika, że co implikuje zależność podstawiając ostatnie wyrażenie do wzoru na otrzyma się zależność jedynie od




Odległość punktu od ustalonego punktu, np. wyrazi więc wzór:
![{\displaystyle [x,y]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b7bd6292c6023626c6358bfd3943a031b27d663)
![{\displaystyle [0,0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e543f601fac1a6510c6fd606aee4cae29fc1a79)

Np. gdy krzywa ma kształt paraboli leżącej w płaszczyźnie to mamy równania



gdzie – parametr paraboli.

Wtedy

oraz


Obliczając powyższą całkę dla danej wartości otrzyma się jednoznaczną wartość współrzędnej uogólnionej Widać stąd, że do opisania położenia ciała, którego ruch ograniczony jest do krzywej płaskiej, wystarczy tylko jedna współrzędna zamiast dwóch współrzędnych



Analogiczny wniosek dotyczy poruszania się ciała po krzywej w przestrzeni 3D – tu zamiast trzech współrzędnych wystarczy także podanie jednej współrzędnej uogólnionej

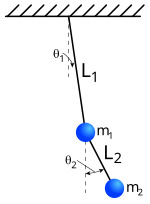
Wahadło podwójne
Zamiast współrzędnych kartezjańskich określających położenia kulek można wprowadzić współrzędne uogólnione – kąty określające odchylenia nici od pionu.

Energia kinetyczna we współrzędnych uogólnionych
Energię kinetyczną układu cząstek przedstawia wzór[2]

gdzie · oznacza iloczyn skalarny, – pochodna wektora położenia -tej cząstki po czasie, – masa -tej cząstki.



Współrzędne kartezjańskie
Jeżeli wektory wodzące cząstek wyrazi się przez współrzędne kartezjańskie,


to wektory prędkości cząstek będą zależeć jedynie od pochodnych współrzędnych po czasie

Ponieważ

to otrzyma się (zastępując oznaczenia współrzędnych przez )


Oznacza to, że energia kinetyczna układu, którego położenie jest zadane przez współrzędne kartezjańskie, zależy jedynie od prędkości cząstek, nie zależy zaś ani od współrzędnych, ani od czasu,

Współrzędne uogólnione zależne od czasu
Jeżeli jednak wektory wodzące cząstek wyrazi się przez współrzędne uogólnione, zależne w ogólności od czasu,


to pochodne czasowe przyjmą postać

i wtedy otrzyma się[3]

co oznacza, że energia kinetyczna będzie zależeć od współrzędnych uogólnionych prędkości uogólnionych i czasu – jeżeli więzy będą zależeć od czasu, czyli



Współrzędne uogólnione niezależne od czasu
Jeżeli jednak więzy będą stałe w czasie, to wszystkie pochodne cząstkowe po czasie będą zerować się – wtedy energia kinetyczna będzie funkcją współrzędnych uogólnionych, funkcją jednorodną kwadratową prędkości uogólnionych niezależną jawnie od czasu, gdyż


Powyższe wyrażenie jest równoważne kwadratowi elementu liniowego trajektorii -tej cząstki

gdyż dzieląc powyższe wyrażenie przez otrzyma się kwadrat prędkość -tej cząstki Dla więzów niezależnych od czasu wystarczy więc znać element liniowy trajektorii cząstki, aby obliczyć jej energię kinetyczną[4].


Wyrażenia na energię kinetyczną w różnych układach współrzędnych
Energia kinetyczna przyjmuje różne wyrażenia w zależności od układu współrzędnych. Dla układów niezależnych od czasu otrzyma się wyrażenia:
1) we współrzędnych kartezjańskich


2) we współrzędnych biegunowych


3) we współrzędnych cylindrycznych


4) we współrzędnych sferycznych


Powyższe przykłady pokazują, że jeżeli współrzędne uogólnione nie zależą jawnie od czasu, to energia kinetyczna jest funkcją jednorodną kwadratową (funkcją jednorodną stopnia 2) prędkości uogólnionych, np. – podobnie jak w przypadku współrzędnych kartezjańskich – jednakże energia kinetyczna zależy tu ponadto od współrzędnych uogólnionych, np. w powyższych przykładach od


Pęd we współrzędnych uogólnionych
We współrzędnych uogólnionych definiuje się tzw. pęd uogólniony sprzężony kanonicznie ze współrzędną uogólnioną który oblicza się jako pochodną lagranżjanu po pochodnej czasowej tej współrzędnej


Jeżeli lagranżjan nie zależy od współrzędnej to

i z równań Eulera-Lagrange’a wynika, że pochodna czasowa pędu uogólnionego będzie równa


a więc pęd uogólniony będzie stały (będzie stałą ruchu).
Zobacz też
Inne układy współrzędnych
Szczególne układy współrzędnych
Przypisy
- ↑ Współrzędne uogólnione, [w:] Encyklopedia PWN [dostęp 2021-07-22] .
- ↑ Torby 1984 ↓, s. 269.
- ↑ Goldstein 1980 ↓, s. 25.
- ↑ Landau i Lifszyc 1976 ↓, s. 8.
Bibliografia
- Bruce Torby: Advanced dynamics for engineers. Nowy Jork: Holt, Rinehart, and Winston, 1984. ISBN 0-03-063366-4.
- Herbert Goldstein: Classical Mechanics. Amsterdam: Addison-Wesley, 1980. ISBN 0-20-102918-9.
- Lew Landau, Jewgienij Lifszyc: Mechanics. Filadelfia: Butterworth-Heinemann, 1976. ISBN 0-75-062896-0.
- Kazimierz Gumiński, Piotr Petelenz: Elementy chemii teoretycznej. Warszawa: Państwowe Wydawnictwo Naukowe, 1989, s. 42–43. ISBN 83-01-08109-0.
- Jerzy Leyko: Mechanika Ogólna. T. 2. Warszawa: PWN, 2006, s. 310. ISBN 83-01-14776-8.
- Wojciech Rubinowicz, Wojciech Królikowski: Mechanika teoretyczna. Warszawa: PWN, 2012, s. 168–171. ISBN 978-83-01-17256-5.
Encyklopedia internetowa (współrzędna):
- PWN: 3998458
- Britannica: science/generalized-coordinates
- Catalana: 0093836









