Den analytiska geometrin är en gren av geometrin där algebraiska metoder från främst linjär algebra används för att lösa geometriska problem. Att de reella talens algebra kan användas för lösning av geometriska problem vilar på Cantor-Dedekinds axiom.
Metoder från analytisk geometri används inom alla tillämpade vetenskaper, men särskilt inom fysiken, till exempel för beskrivningen av planeternas banor. Ursprungligen behandlade analytisk geometri endast frågor rörande planet och den rumsliga (euklidiska) geometrin. Mera allmänt beskriver den analytiska geometrin affina rum av godtyckliga dimensioner över godtyckliga kroppar.
Koordinatsystem
Koordinatsystemet är kartesiskt om axlarna är inbördes vinkelräta mot varandra
Grundläggande för analytisk geometri är begagnandet av ett koordinatsystem. Vanligen används ett kartesiskt koordinatsystem [1].
Analytisk geometri i R2
Koordinatsystem och transformationer
Med (x, y) betecknas de ursprungliga koordinaterna och med (x', y') de nya.
Parallellförskjutning
Om x0, y0 är koordinaterna för origo i det nya systemet, så gäller:
Rotation
Om rotationsvinkeln räknas positiv (den vinkel som positiva x-axeln behöver vridas för att sammanfalla med positiva y-axeln) blir transformationsformlerna
Avståndet mellan två punkter
Avståndet mellan punkterna (x1, y1) och (x2, y2) är
Arean av en triangel
Om triangelns hörn har koordinaterna (x1, y1), (x2, y2) och (x3, y3), är dess area
För att T skall vara positiv, måste punkterna (x1,y1), (x2, y2) och (x3, y3) följa på varandra i positiv led, det vill säga moturs.
Delning av en sträcka
Delas sträckan mellan punkterna (x1, y1) och (x2, y2), i förhållandet m/n blir delningspunktens koordinater
Vinkelkoefficienten för en rät linje
Låt vara den vinkel en linje bildar med x-axeln. Om linjen går genom punkterna (x1, y1) och (x2,y2) blir vinkelkoefficienten
Räta linjens ekvation
Räta linjens ekvation är en förstgradsekvation i x och y och den allmänna formen är
Varje ekvation av första graden representerar en linje.
Vinkelkoefficienten för tangenten till en kurva i rätvinkliga koordinater är lika med funktionens derivata i tangeringspunkten:
Asymptoter
Med en asymptot till en kurva menas en linje sådan att avståndet mellan linjen och en punkt på kurvan går mot noll då punkten går mot oändligheten.
Om en asymptot till kurvan y = f(x) har ekvationen y = kx + m, bestäms k och m enligt
Analytisk geometri i R3
Koordinatsystem i R3
Koordinatsystem
Som koordinatsystem i R3 används tre plan, vanligtvis vinkelräta mot varandra. Planens skärningspunkter kallas x-, y- och z-axlarna. De tre planen betecknas efter ingående axlar som xy-planet, yz-planet och xz-planet [2].
Rätvinkliga koordinater
Riktningscosiner
Huvudartikel: Riktningscosiner
En punkt P:s koordinater (x, y, z) är de vinkelräta avstånden till yz-, xz- och xy-planen. Om är vinklarna mellan ortsvektorn med längden r och axlarna är
där
är riktningscosinerna vilka betecknas a, b och c och för vilka gäller
Vinkeln mellan två riktningar
Om två riktningar är givna, OA1 med riktningscosinerna a1, b1 och c1 och OA2 med riktningscosinerna a2, b2 och c2, så gäller för vinkeln mellan OA1 och OA2:
Rotation av koordinatsystem
Vid övergång från ett rätvinkligt koordinatsystem (xyz) till ett annat (x'y'z') med gemensamt origo men olika axelriktningar och med riktningscosinerna i xyz-planet betecknade
för x'-axeln med
för y'-axeln med
för z'-axeln med
blir transformationformlerna
Avståndet mellan två punkter
Avståndet d mellan punkterna (x1, y1, z1) och (x2, y2, z2) är
Om a, b och c är riktningscosinerna för en linje genom de båda punkterna, beräknas dessa som
Plan i R3
Om (x0, y0, z0) är en ortsvektor till en punkt i planet och (A, B, C) en normalvektor till planet, kan planets ekvation skrivas som skalärprodukten av normalvektorn och vektorn (x - x0, y - y0, z - z0):
vilket ger den allmänna formen av planets ekvation som
där D är
En ekvation av första graden representerar alltid ett plan. Riktningscosinerna för planets normal är
Tecknet framför roten väljs så att
alltid är positiv. Därigenom är normalen riktad mot planets "positiva" sida.
Normalform
Genom division med
erhålls planets ekvation på normalform
där är de vinklar som planets normal bildar med koordinataxlarna och p är längden av normalen från origo till planet.
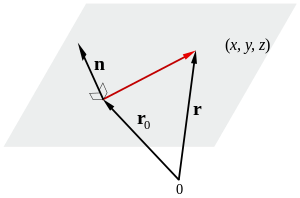
Vektorform
Ekvationen för ett plan med normalvektorn n, en given punkt r0 och med r som ortsvektor för en godtycklig punkt (x, y, z) i planet är
Avståndet från en punkt till ett plan
Punktens koordinater sätts in i planets normalform
och avståndet är då lika med vänsterledet med tecknet '-' om punkt och origo ligger på samma sida om planet, annars med tecknet '+'.
Exempel:
Beräkna avståndet från punkten (1, -3, 2) till planet
Planets ekvation i normalform
Vinkeln mellan två plan
Vinkeln mellan planen
bestäms av ekvationen
Om planens normalvektorer är kända kan skalärprodukten av normalvektorerna användas för att bestämma vinkeln mellan planen:
Räta linjen
Räta linjen kan betraktas som skärningen mellan två plan och representeras av förstagradsekvationerna
En linje är bestämd av en punkt P = (x0, y0, z0) på linjen och en riktningsvektor u:
I parameterform gäller för en punkt (x, y, z) på linjen:
eller
där a, b och c är riktningskoefficienter, eller efter eliminering av parametern
I vektorform kan linjens ekvation skrivas
Kurvor i R3
En kurva i R3 kan framställas på flera sätt:
Som skärningen mellan två ytor:
I parameterform:
I vektorform:
Exempel:
Skruvlinjen kan framställas i parameterform som
Båglängd
Längden av ett bågelement på kurvan är
Längden av kurvbågen mellan t0 och t är
Tangent
Tangentens ekvation i vektorform är
Normalplanet
Ekvationen i vektorform för normalplanet i punkten s är
Oskulerande planet
I en punkt på en kurva i R3 kan i allmänhet läggas oändligt många tangentplan till kurvan. Det tangentplan som närmast ansluter till kurvan kallas oskulerande planet och har ekvationen
där A, B och C bestäms ur formlerna
eller i vektorform
Principalnormal
Den normal till kurvan som ligger i det oskulerande planet kallas principalnormal. Dess riktning är den samma som för vektorn
Längden av denna vektor benämns krökning K, varför vektorn också kallas krökningsvektor:
Krökningsradie
Krökningsradien är krökningens inverterade värde:
Den punkt på principalnormalen som ligger på avståndet R från kurvan kallas krökningscentrum och kan i vektorform anges som
Ytor i R3
En yta i R3 kan skrivas i parameterform
eller i vektorform
Ekvationen kan också vara given på formen
eller
I det senare fallet kan x och y betraktas som parametrar, varvid ekvationen i parameterform blir:
Linjeelement
Tangentplanets ekvation
Om ekvationen för ytan är
kan tangentplanets ekvation skrivas om tangeringspunkten är (x0, y0, z0):








![{\displaystyle ={\frac {1}{2}}[x_{1}(y_{2}-y_{3})+x_{2}(y_{3}-y_{1})+x_{3}(y_{1}-y_{2})]\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c0f59a1cbf40124aa51042333257ebb46bbe5b9f)






























![{\displaystyle k=\lim _{x\rightarrow \infty }{\frac {f(x)}{x}},\quad m=\lim _{x\rightarrow \infty }[f(x)-kx]\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/179982adf2ef7eccae4ac3966dd1d9bb1d2826c8)



































































![{\displaystyle {\begin{aligned}d\mathbf {r} ^{2}&=ds^{2}=dx^{2}+dy^{2}+dz^{2}=\\&=\left[1+\left({\frac {\partial z}{\partial x}}\right)^{2}\right]dx^{2}+2{\frac {\partial z}{\partial x}}{\frac {\partial z}{\partial y}}dx\,dy+\left[1+\left({\frac {\partial z}{\partial y}}\right)^{2}\right]dy^{2}\,\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/89bf4a96370221f0a71e0a0d1dc8138847ecfb89)




 Wikimedia Commons har media som rör Analytisk geometri.Bilder & media
Wikimedia Commons har media som rör Analytisk geometri.Bilder & media











